ML学习笔记 #10 K-Means 聚类
本文最后更新于:2022年12月4日 中午
本文将开始介绍无监督学习。与之前的内容不同,无监督学习的数据不再包含标注的标签,即采用完全无标注的数据集。其中聚类聚类问题属于无监督学习的范畴,其目的是在无标注的情况下将样本集划分为若干类。
本节要介绍的 K-Means 算法就是聚类算法的典型,其中的 \(K\) 指将样本集划分为 \(K\) 个簇(Cluster)。而我们之前介绍过的 KNN 算法,则是一种有监督分类器,其中的 \(K\) 是设定的近邻数量,初学者容易混淆二者。
聚类问题 | Clustering
首先简单介绍一下聚类问题,其本质是「根据样本之间的相似度,将数据进行归类」,由于没有显式的标签,唯一的依据就是样本之间的相似度。而相似度的度量方法,可以大致分为:
- 距离相似性度量:以欧式距离为代表的各种距离、余弦相似度等。
- 密度相似性度量:以 KL 散度为代表的各种熵。
- 连通相似性度量:以杰卡德指数为代表的各种统计量,在集合与图背景下更为常用。
由以上度量方法引申出的聚类算法也有很多:
- 基于划分的聚类:K-Means、K-Means++、Bisecting K-Means 等。
- 基于密度的聚类:DBSCAN、Mean Shift、OPTICS 等。
- 层次聚类:DIANA、AGNES、HDBSCAN、Agglomerative、Divisive 等。
- 基于图的聚类:Chinese Whisper、CDP 等。
聚类评价指标
如何评价一个无监督的算法?和有监督类似,仍然需要一个测试集,但无监督算法的测试集则有无标签都可以。针对数据有类别标签的情况,最常用的评价指标有两种:
- 均一性:每个聚簇中正确分类的样本数占该聚簇总样本数的比例和,类似于精确率,如果一个簇中只包含一个类别的样本,则称其满足均一性。
- 完整性:每个聚簇中正确分类的样本数占该类型的总样本数比例的和,类似于召回率,同类别样本被归类到相同簇中,则称其满足完整性。
同样,将上述二者加权平均,就能得到类似 \(\mathrm{F} \text {-score}\) 的 \(\mathrm{V} \text {-score}\)。此外,还有:
- 调节兰德系数(Adjusted Rand index,ARI):计算聚类结果与实际划分的重叠程度,重叠程度越高表示聚类效果越好。
- 归一化互信息(Normalized Mutual Information,NMI):计算聚类结果的簇内互信息,值越大表示聚类结果越相近,效果越好。
对于无类别标签的情况,最常用的指标是轮廓系数(Silhouette Coefficient),结合了内聚度(Compactness)和分离度(Separation)两种因素。简单来说,就是希望簇内样本尽量相近,簇间样本尽量相远,下文将详细介绍。
K-Means 算法
K-Means 算法目的在于寻找最优的 \(K\) 个聚类中心,并将每个样本点归到距离最近的中心点,而聚类中心的优劣显然就取决于能否使距离之和最小化。
如果已知每个样本点的所属类,那很容易就能算出中心(即质心)。如果已知每个类的中心,那么也很容易进行分类(按距离归类)。因此这是一个「先有鸡还是先有蛋」的问题,通过交替迭代计算,直到收敛就能得到两个问题的答案。计算步骤如下:
- 首先随机初始化 \(K\) 个聚类中心;
- 计算所有点到 \(K\) 个中心的距离,将每个点归到距离最近的中心,得到 \(K\) 类;
- 计算 \(K\) 个类的最优聚类中心,即用该类别样本点的平均位置来更新 \(K\) 个中心;
- 重复 2-3 步,直到聚类中心不再改变,算法结束。
问题定义
下面将更严谨地给出 K-Means 算法的数学定义,首先我们有数据集: \[ \begin{array}{c} \left\{ x^{(i)}\in \mathbb{R} ^n,i=1,2,\cdots ,m \right\}\\ \left\{ \mu _k\in \mathbb{R} ^n,k=1,2,\cdots ,k \right\}\\ x^{(i)}\rightarrow \mu _{c^{\left( i \right)}}\\ \end{array} \]
- \(m\) 代表数据集中样本的数量;
- \(x\) 代表样本特征,是一个 \(n\) 维向量,不需要设定偏置项 \(x_0=1\);
- \(K\) 代表设定的目标类别数,为超参数;
- \(\mu\) 代表聚类中心,共有 \(K\) 个,下标取值为类别编号;
- \(c^{(i)}\) 代表样本 \(x^{(i)}\) 所属的类别,取值范围也是 \([1,K]\);
- \(\mu _{c^{\left( i \right)}}\) 代表样本 \(x^{(i)}\) 所属的聚类中心。
此时我们可以将前文的第 2 步视为: \[ c^{\left( i \right)}:=\underset{k}{\min}\left\| x^{\left( i \right)}-\mu _k \right\| _2^2 \] 这里的距离定义为欧氏距离的平方。第 3 步视为: \[ \mu _k:=\frac{1}{\mathrm{Count}\left( c^{\left( i \right)}=k \right)}\sum_{c^{\left( i \right)}=k}{x^{\left( i \right)}} \] 注意,如果此时对于某个类别 \(k\),没有数据属于某一聚类中心,即 \(\mathrm{Count}\left( c^{\left( i \right)}=k \right) =0\),则可以将该聚类中心删去(这样分类数会减少)或者置于随机位置上(保持分类数不变)。
优化目标
经过上文的定义,我们可以引入一个代价函数——残差平方和(Sum of Squared Error,SSE),即各数据点到它所属于的聚类中心的距离之平方和,取均值(Mean): \[ J\left( c^{(1)},\cdots ,c^{(m)},\mu _1,\cdots ,\mu _K \right) =\frac{1}{m}\sum_{i=1}^m{\left\| x^{\left( i \right)}-\mu _{c^{\left( i \right)}} \right\| _{2}^{2}} \] 很容易证明,2、3 两个步骤都是在减小这个代价:第 2 步减小 \(c^{(i)}\) 引起的代价,第 3 步减小 \(\mu _k\) 引起的代价。所以正确实现的 K-Means 算法的代价应随着迭代次数增加而减小,虽然不是凸函数,但是也可以收敛到局部最优解,不会陷入一直选择质心的循环停不下来。
选取簇数 \(K\)
在实践中,我们可以任取 \(K<m\) 个数据点作为聚类中心。随着聚类簇数 \(K\) 不断增大,样本数据划分会逐渐变得更加精细;因此,随着 \(K\) 不断增大,每个簇的聚合程度会逐渐提高,代价函数 SSE 会逐渐变小。极端情况下,当 \(K=m\) 时,每个样本自成一簇,此时代价函数为 \(0\)。
\(K\) 增大则 \(J\) 减小,绘制出代价函数关于簇数的变化曲线:
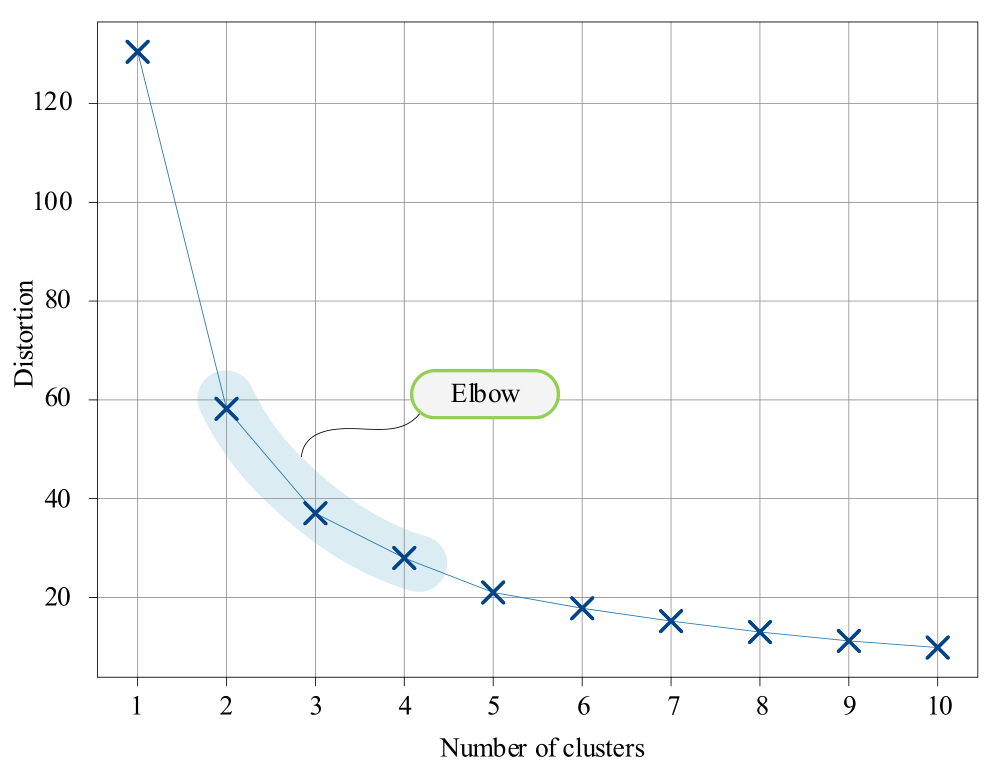
观察上图,我们发现当 \(K\) 小于「合适的簇数」时,代价函数下降的幅度极大;而当 \(K\) 大于「合适的簇数」时,下降的幅度又逐渐变缓。曲线呈现出「手肘」形状,因此人们通常以手肘法则(Elbow Method)为依据来指导选择这个超参数。手肘法的缺点在于需要人工观察、不够自动化,所以又有了 Gap Statistic 方法,此处不展开介绍。
另一种思路则是从特征空间的角度出发,绘制样本的轮廓图(Silhouette Plot)来选择簇数。轮廓图是针对单个样本 \(x^{(i)}\) 而言的,样本 \(x^{(i)}\) 的轮廓系数(Silhouette Coefficient)可以通过以下方式计算: \[ s^{\left( i \right)}=\frac{b^{\left( i \right)}-a^{\left( i \right)}}{\max \left\{ a^{\left( i \right)},b^{\left( i \right)} \right\}} \] 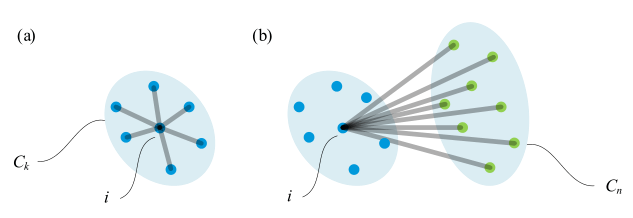
其中,左图为簇内不相似度 \(a^{\left( i \right)}\),代表样本 \(x^{(i)}\),到同簇的其他样本 \(x^{(j)}\) 的距离平均值: \[ a^{\left( i \right)}=\frac{1}{\mathrm{Count}\left( c^{\left( i \right)}=k \right) -1}\sum_{c^{\left( j \right)}=k,i\ne j}{\left\| x^{\left( i \right)}-x^{\left( j \right)} \right\| _{2}^{2}} \] 右图为簇间不相似度 \(b^{\left( i \right)}\),代表样本 \(x^{(i)}\) 到其他簇样本 \(x^{(j)}\) 的距离平均值的最小值: \[ b^{\left( i \right)}=\underset{k'\ne k}{\min}\frac{1}{\mathrm{Count}\left( c^{\left( j \right)}=k' \right)}\sum_{c^{\left( j \right)}=k'}{\left\| x^{\left( i \right)}-x^{\left( j \right)} \right\| _{2}^{2}} \] 显然,轮廓系数的取值在 \([-1,1]\) 之间,\(s^{\left( i \right)}\) 越趋向于 \(1\),说明样本 \(x^{(i)}\) 分类越正确;\(s^{\left( i \right)}\) 越趋向于 \(-1\),说明样本 \(x^{(i)}\) 分类越错误;当 \(s^{\left( i \right)}\) 在 \(0\) 附近时,说明样本 \(x^{(i)}\) 靠近聚类边界。
K-Means 的衍生算法
K-Means 简单易用,方便部署,但是也存在着许多缺点。除了上文提到的簇数 \(K\) 的选择问题,它还有以下缺点:
- 容易陷入局部最优解;
- 对噪音、异常点、离群点(Outlier)过于敏感;
- 单次迭代复杂度高达 \(O(Knm)\);
- 对于非凸的数据集难以有效。
针对这些缺点也有许多的衍生算法,下面将简要介绍。
K-Means++
在运行 K-Means 算法时,首先需要随机初始化所有聚类中心点,然而不同的选取方式可能导致不同的收敛结果——停留于局部最优解。例如下图:
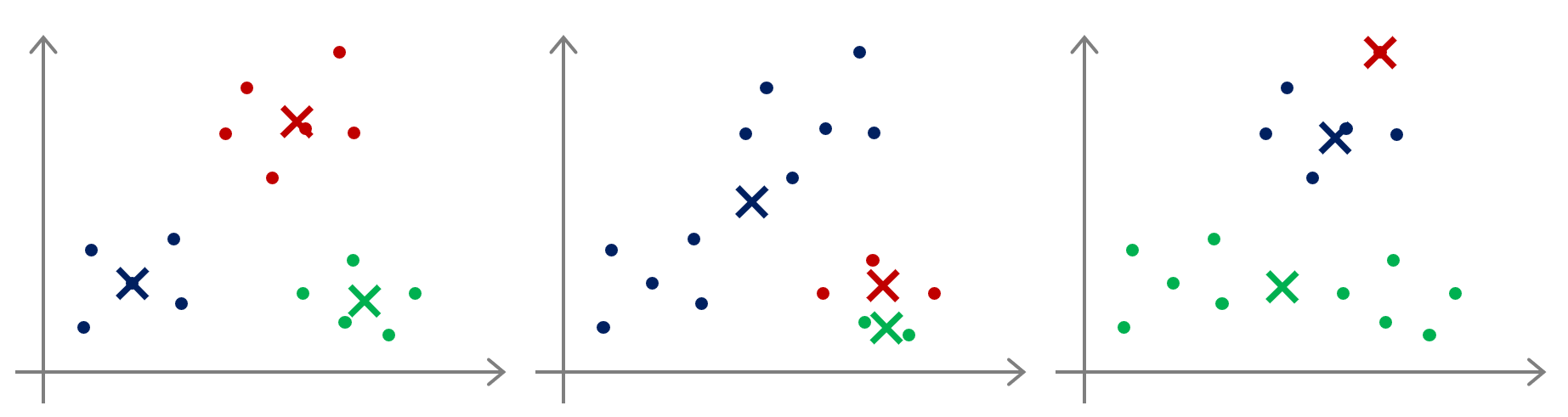
比较朴素的做法是多次运行 K-Means 算法,每一次都重新随机初始化,最后选取代价函数最小的结果。这种方法在 \(K\) 较小的时候还是可行的,但是对于 \(K\) 较大的情况需要重复的次数则非常多。
K-Means++ 是最经典的改进算法,其核心思想是:逐个选取聚类中心,且其他距离现有中心越远的样本点越有可能被选为下一个聚类中心。具体步骤如下:
- 首先随机选取第一个初始聚类中心 \(\mu_1\);
- 计算每个样本与当前已有聚类中心之间的最短距离,用 \(D(x^{(i)})\) 表示,则该样本被选取为下一个聚类中心的概率为 \(P(x^{(i)})\);
- 重复第 2 步,直到选出 \(K\) 个初始聚类中心。
其中概率 \(P(x^{(i)})\) 的计算方法为: \[ P(x^{\left( i \right)})=\frac{D(x^{\left( i \right)})}{\sum_{j=1}^m{D(x^{\left( j \right)})}} \]
注意,K-Means++ 选点是基于概率,而非直接选择距离最远的点,因为这样很容易陷入离群点,导致一个离群点被单独聚为一类。
Bisecting K-Means
二分 K-Means 算法也是为了改进初始中心选取的问题,它巧妙地规避了「一次选出 \(K\) 个」的问题。其核心思想是:自上而下地逐渐增加簇数,每次选择能最大程度降低代价函数的簇将其划分为两个簇。具体步骤如下:
- 首先将所有数据点看作一个簇类;
- 对于每一个簇计算簇内的 SSE,同时在每一个簇上单独进行 \(K=2\) 的 K-Means 聚类,计算将该簇一分为二后的总 SSE;
- 求出每个簇的两个 SSE 之差,将差值最大者一分为二,并重新更新每个点所属的中心;
- 重复第 2-3 步,直到选出 \(K\) 个初始聚类中心。
该方法与层次聚类(Agglomerative Clustering)有点类似但却不同。层次聚类每次选取空间中距离最近的两个点,将其聚为新的「广义点」。最终可以将所有点自下而上聚集为一类,进而自上而下划分为若干类。
K-Mediods
离群点问题带来的影响有很多,直观地就是:如果选中了离群点作为初始聚类中心,大概率会单独聚为一类;即使没有选中,离群点也会给 SSE 带来较大影响,导致预测的聚类中心偏移。
一种可行的方法是通过局部离群因子(Local Outlier Factor,LOF)算法找出离群点,这是一种基于密度的检测方法。此外,还有基于中位数计算的 K-Mediods 聚类。该算法不选用均值,转而采用簇中位置最中心的样本点(Mediods)作为参考点,必须是实际存在的点。选取的准则是所有点到该中心的 SSE。
由于选取的是实际存在的点,那么稀少的离群点肯定不会被选中,也不会导致聚类中心偏移到太远的位置。该方法对于小规模数据是非常有效的,但是注意到选取 Mediods 时需要遍历簇内每一个点,并计算所有距离,所有复杂度是 \(O(n^2)\) 的,比起 K-Means 要慢许多。
Mini Batch K-Means
对于超大规模数据量 \(m\) 的 K-Means,每一轮迭代需要 \(O(Knm)\) 完成,且初值选取不好时需要很多轮次才能收敛,总耗时太久。优化的思路有两个:减少单次迭代的复杂度、减少迭代次数。
其中前者常用的方法有 Elkan K-Means 优化,其在计算样本与聚类中心的距离时,利用三角形关系中的两边之和大于第三边,减少距离计算的次数。该方法可以实现常数级的优化,但依然不够。
后者采用的方法是 Mini Batch(分批处理),通过随机采样得到小规模的数据子集,由于总量很大,采样时能确保数据分布几乎一致。在子集上运行 K-Means 算法能大幅减少收敛时间,并且将聚类中心初始化到一个相对好的位置。具体步骤如下:
- 随机采样出部分数据子集,并在子集上使用 K-Means 算法收敛得到 \(K\) 个聚类中心;
- 继续采样出部分数据,加到上述的子集中,并将其归到最近的聚类中心;
- 更新 \(K\) 个聚类中心;
- 重复第 2-3 步,直到所有数据都加入子集。
Kernel K-Means
对于非凸的数据样本,K-Means 往往无法正确聚类:
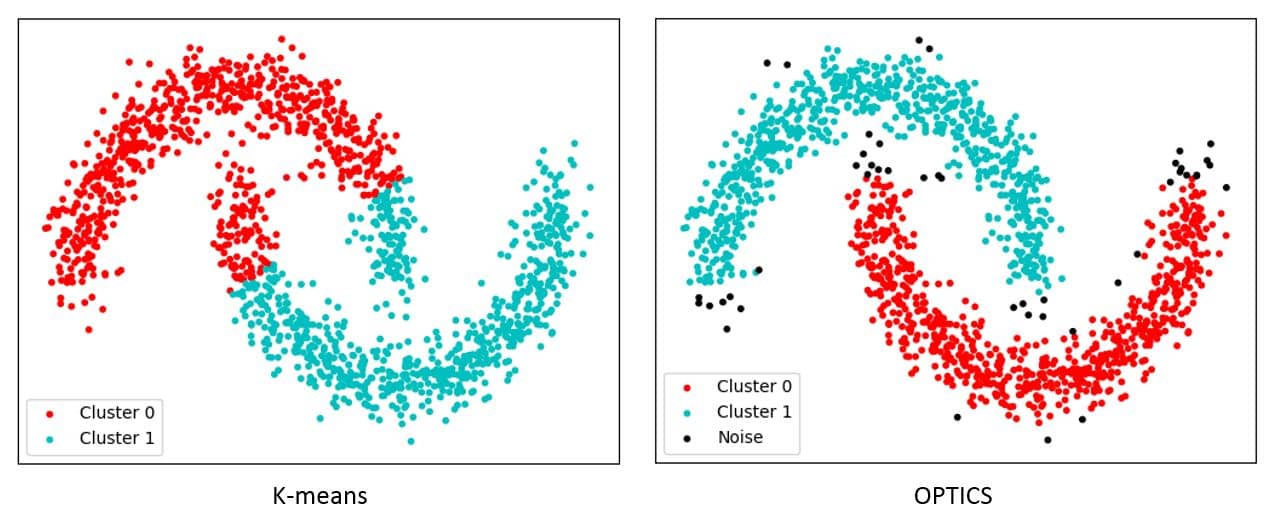
在 ML学习笔记 #9 支持向量机 中我们曾介绍过 Kernel 方法,在 K-Means 中同样也可以使用。此外,基于密度的聚类算法则更加适合于非凸的样本,这里不展开介绍。
练习
平面点集聚类
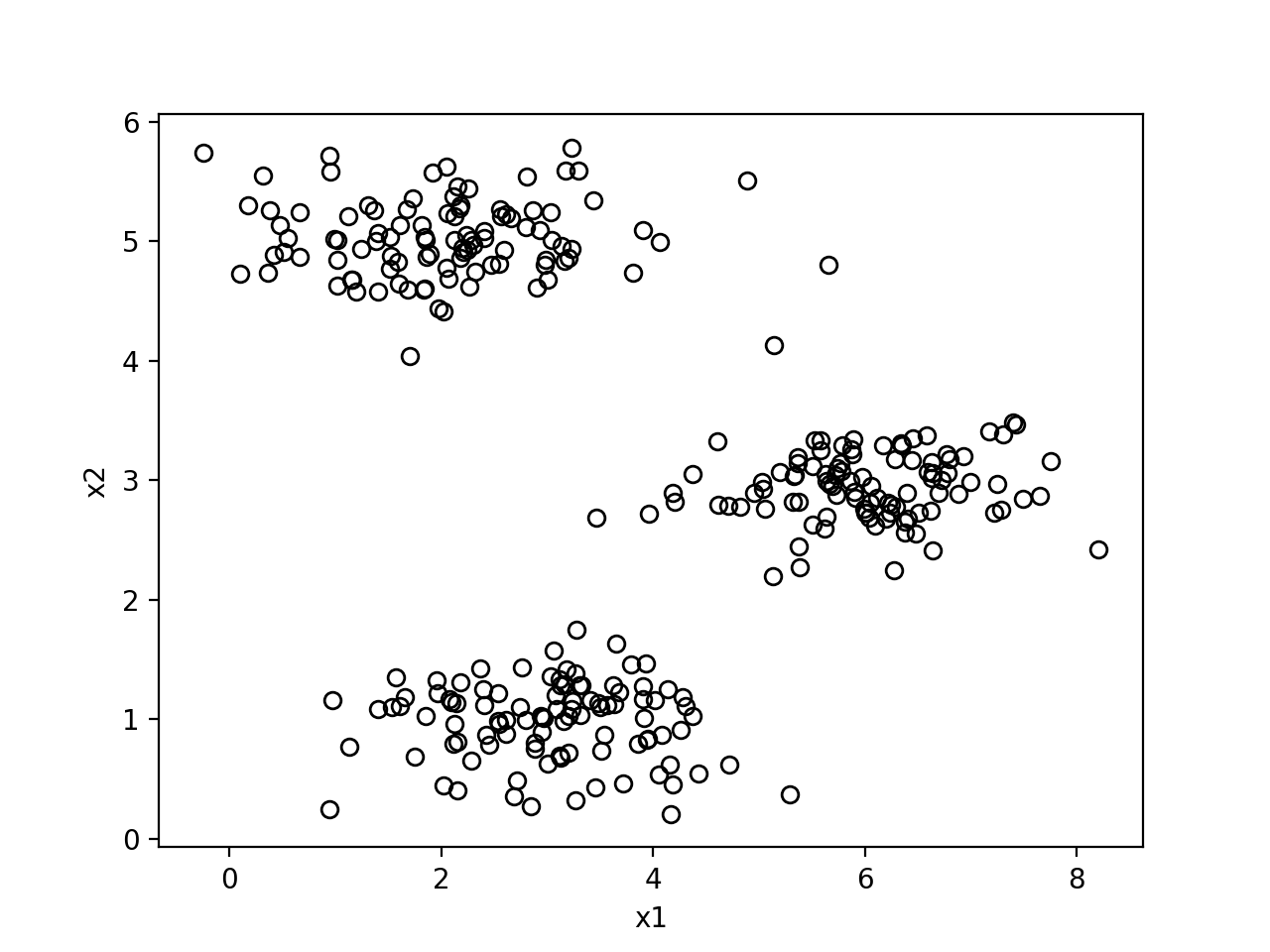
下面以 Coursera 上的数据集 ex7data2.mat 为例,这是一个三类的平面点集,首先看看数据集的样子:
使用如下代码聚类:
1 | |
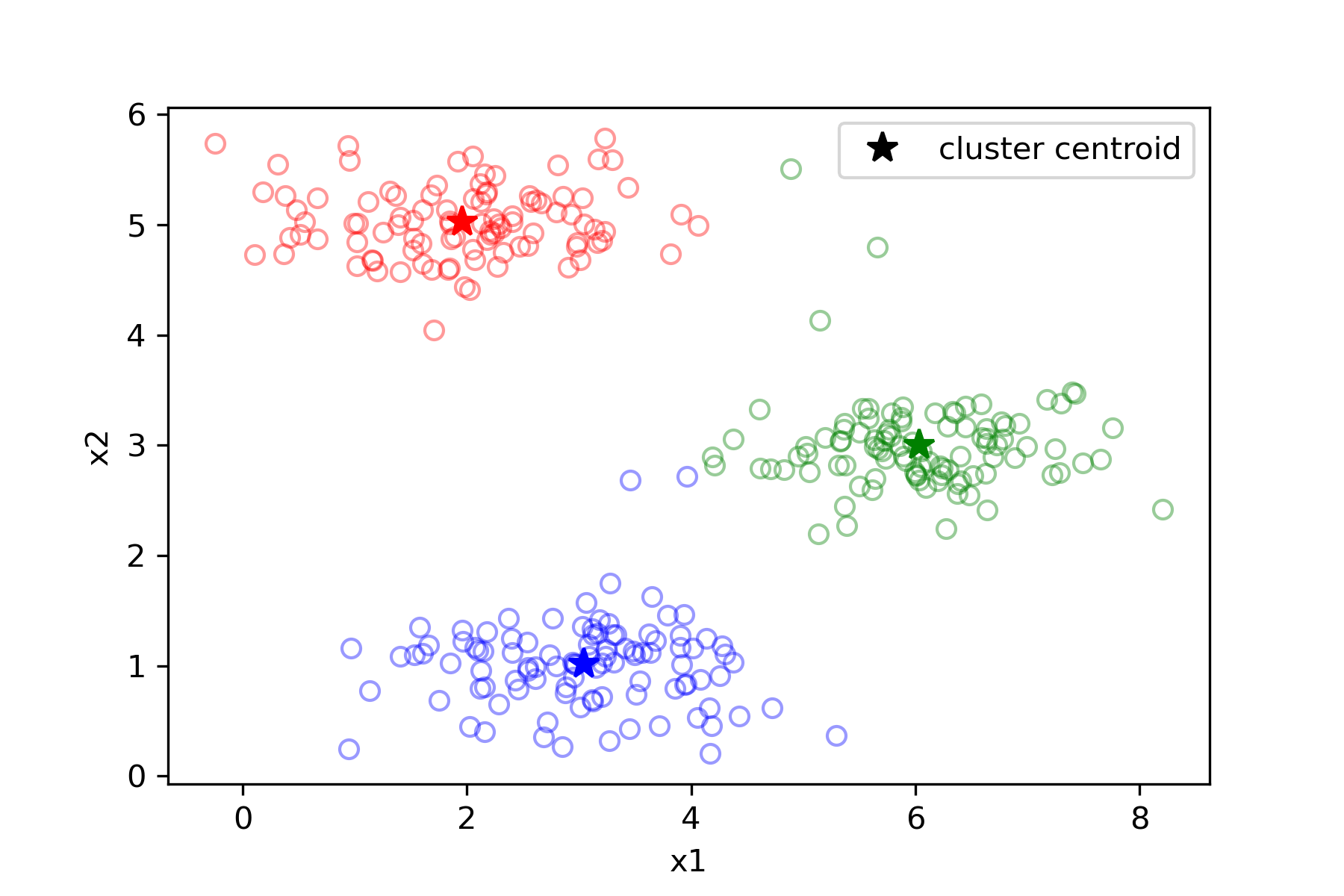
结果如下:
图像压缩
图像是有若干像素组成的,每个像素存放 \(3\) 个字节的信息代表其 \(\text{RGB}\) 三通道,三通道可以组成成百上千种颜色,如果可以将其压缩到 \(16\) 种颜色,那么只需要在对应像素位置存放一个 \(4\) 位二进制数即可,这样就把图像压缩到了原来的 \(\frac{1}{6}\) 大小。
现在我们用 K-Means 算法去得到这 \(16\) 种颜色:把原来的所有像素点映射到 \(\text{RGB}\) 空间,再将其聚为 \(16\) 类,得到 \(16\) 个聚类中心用来表示新的压缩像素点。
我们使用的图像含有 \(128\times128\) 个像素,可以处理为 \((128\times128,3)\) 的二维数组,每一行就是一个像素,包含 \(3\) 个值,即 \(\text{RGB}\) 三通道。这就是我们的输入数据。原图如下:

使用如下代码聚类:
1 | |
压缩后的图片如下:
